Sensor de distância ultrassônico HC-SR04
Aprenda a utilizar o sensor de distância ultrassônico HC-SR04 com o Arduino
- O que é o sensor de distância ultrassônico HC-SR04
- Como utilizar o sensor de distância ultrassônico HC-SR04 com o Arduino
Sensor de distância ultrassônico HC-SR04
Este sensor funciona enviando ondas sonoras do transmissor, que então atingem um objeto, e depois retornam ao receptor.
A distância então é determinada pelo tempo que as ondas sonoras levam para retornar ao sensor.
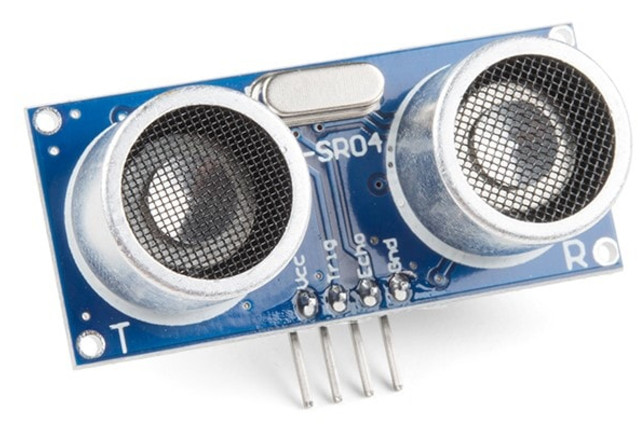
Ele pode ser controlado através de dois pinos, sendo um deles para o envio (trigger) das ondas sonoras, e o outro para a leitura (echo) do retorno delas.
No Arduino, usamos a função pulseIn() para detectar o retorno da onda o receptor.
Para converter o resultado, utilizamos a fórmula: distância = (duração * .0343) / 2.
O valor .0343 é a velocidade aproximada do som em centímetros por microssegundo.
Devemos dividir o resultado por 2 porque a onda sonora vai até o objeto e retorna até o receptor.
Sensor de distância ultrassônico HC-SR04
Neste projeto você criará um circuito que faz o uso de um sensor de distância ultrassônico HC-SR04 no Arduino.
Para a criação deste circuito serão necessários os seguintes componentes:
- 1x Breadboard
- 1x Arduino UNO
- 1x Sensor de distância ultrassônico HC-SR04
- Jumpers
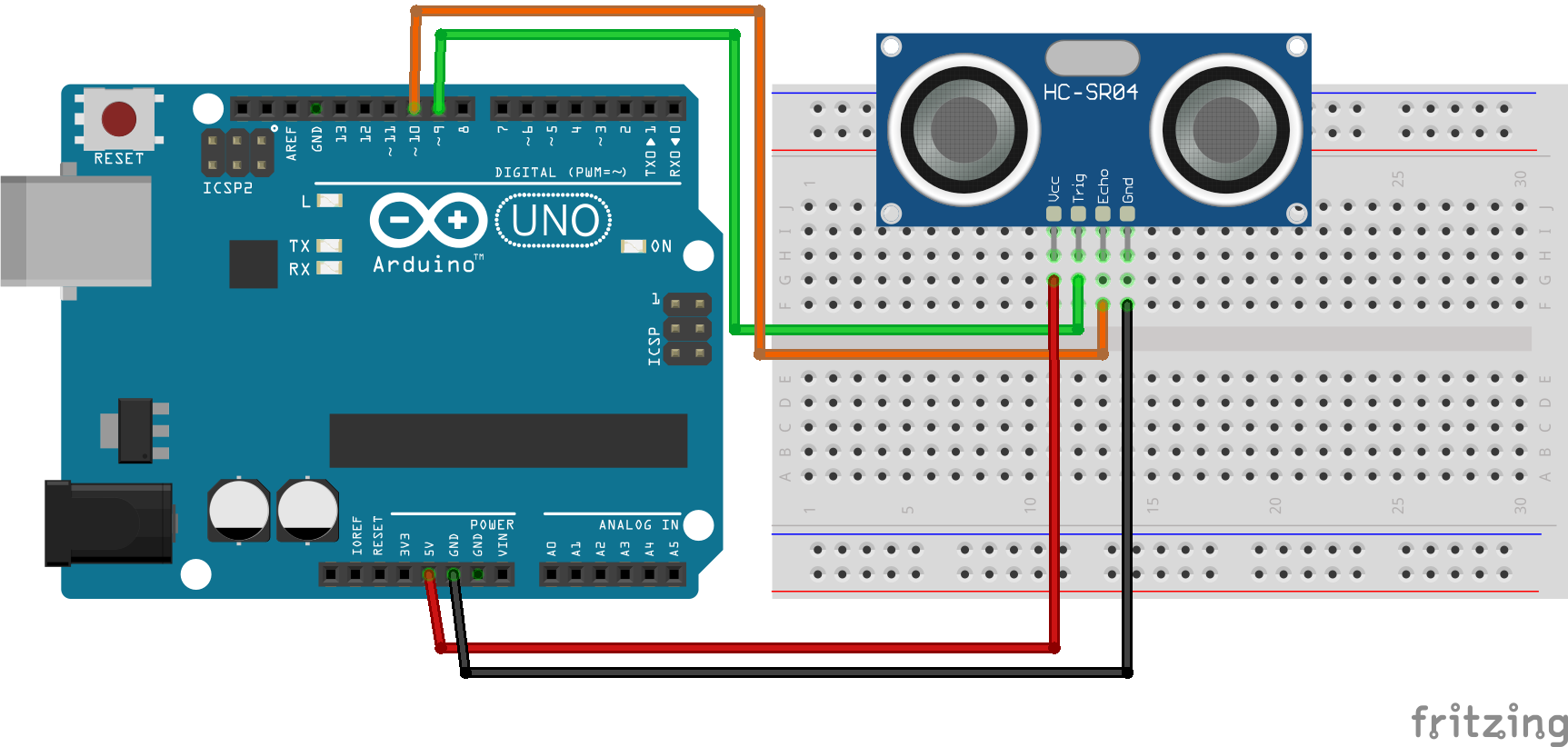
Circuito sensor de distância ultrassônico HC-SR04
Para montar o circuito, visualize na imagem a seguir como conectar os componentes entre a placa Arduino e a breadboard.
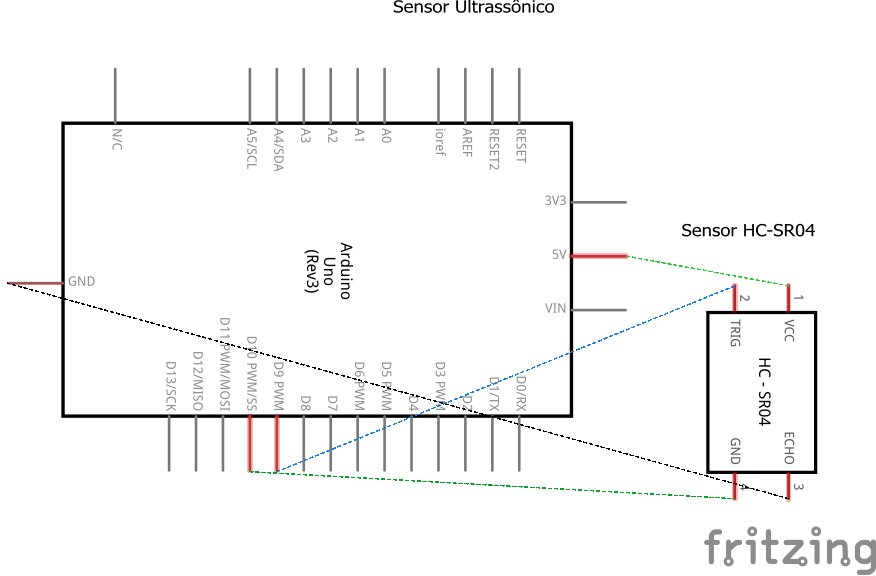
Schematics sensor de distância ultrassônico HC-SR04
A seguir temos o schematics do circuito, que detalha suas conexões e fornece detalhes mais específicos do que o circuito da imagem anterior.
Código fonte para o circuito do sensor de distância ultrassônico HC-SR04
Uma vez criado o circuito, use o código fonte a seguir no Arduino IDE para fazer o upload dele na placa Arduino e assim ver o resultado do circuito em funcionamento.
/**
* Código do curso Magos do Arduino para conectar um sensor
* de distância ultrassônico HC-SR04 com o Arduino.
*
* Ele imprime a distância em centímetros no Serial Monitor.
*
* (c) Copyright KazaleIT
* @kazaleitoficial no YouTube
**/
#define PINO_TRIGGER 9
#define PINO_ECHO 10
float duracao; // duração até o som retornar de trigger para echo
float distancia; // distância final calculada em centímetros(cm)
void setup() {
pinMode(PINO_TRIGGER, OUTPUT);
pinMode(PINO_ECHO, INPUT);
Serial.begin(9600);
}
void loop() {
// envia um sinal para medir a duração do sinal
digitalWrite(PINO_TRIGGER, LOW);
delayMicroseconds(2); // aguarda 2 microsegundos para garantir que o pino está em LOW
digitalWrite(PINO_TRIGGER, HIGH);
delayMicroseconds(10); // envia o sinal por 10 microsegundos
digitalWrite(PINO_TRIGGER, LOW);
// utiliza a função pulseIn para detectar o tempo de acionamento do pino echo
// consulte https://docs.arduino.cc/language-reference/en/functions/advanced-io/pulseIn/
// para maiores detalhes sobre o pulseIn
duracao = pulseIn(PINO_ECHO, HIGH);
// calcula a distância em centímetros fazendo a conversão da duração comparada com
// a velocidade da luz em metros por segundo
// o valor é dividido por 2 pois o sinal tem que ir e voltar do alvo
distancia = (duracao * 0.0343) / 2;
Serial.print("Distância (cm): ");
Serial.println(distancia);
delay(100);
}